
 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114ZNH-IRW03型 工业机器人装调应用与维护实训平台
一、概述
ZNH-IRW03型 工业机器人装调应用与维护实训平台设置内容对应工业机器人机械装配与调试、电气安装与调试、机电联调、机器人功能应用、PLC 应用、故障维修等职业技术技能,涵盖工业机器人机电装调、工业机器人位置示教、工业机器人编程、工业机器人与 PLC 的通信、人机交互、可编程控制、气动控制等专业核心能力和核心知识。同时,ZNH-IRW03型 工业机器人装调应用与维护实训平台可服务于中职、高职以及应用本科院校《工业机器人基础》、《工业机器人拆装与调试》、《工业机器人示教与编程》、《工业机器人应用与维护》等多门课程教学,引领相关院校机器人及相关专业的课程建设和深化课程教学改革。ZNH-IRW03型 工业机器人装调应用与维护实训平台由“机器人机械装配与调试实训平台”和“机器人电气安装与调试实训平台”两大部分构成,并配置轨迹描绘、搬运、码垛等典型应用实训组件。

1、 贴合工业实际,突显工艺装配规范,实训平台各环节按照工业机器人实际生产工艺进行设置,以工业机器人机械及电气装调、故障排除及维修维护为实训与考核重点,并在此基础上增加轨迹描绘、搬运、码垛等典型功能应用和机器人外部模式下 PLC 的远程控制功能。可使使学生了解工业机器人机械结构和电气系统控制原理,掌握机器人机械及电气装配工艺、机电联调、夹具装调、典型功能应用、维修维护与 PLC 应用等技能,以适应工业市场岗位能力需求。
2、机器人核心部件国产化,系统接口开放并配置专用工艺软件包
3、实训平台机器人本体、控制器、伺服驱动器、示教器、IO 模块及控制系统等核心模块均具备自主知识产权。使学生通过实训环节从根本原理层面掌握机器人核心部件的操作和维修维护方法。
三、技术参数
1、整机功率:1.5KW
2、长/宽/高:1350×650×1600mm(电气装调平台)
3、长/宽/高:1600×880×1600mm(机械装调平台)
4、耗气量:65L/MIN
5、重量:450KG
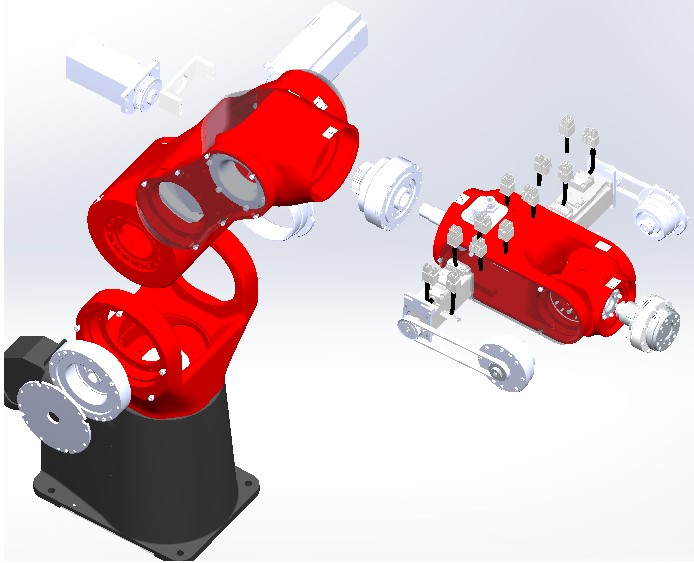
1、可拆装式机器人本体
ZN-ZN603型 工业机器人本体*大臂展 571.5mm,额定负载 3Kg, 重复定位精度± 0.02mm,机器人末端可配置吸盘、卡爪、胶枪、打磨等夹具,广泛应用 3C 等行业的搬运、装配、涂胶、打磨等工序作业流程。
2、可拆装式机器人电气系统
ZN-ZN603型 工业机器人电气系统主要包含 IPC 控制器、交流伺服驱动器、总线式IO 模块、示教器等核心部件以及低压元器件组成。核心模块均具备接口开放,可方便进行二次开发工作。学生主要针对机器人机器人IPC 控制器、交流伺服驱动器、总线式 IO 模块以及电气元件进行部分线缆连接,电气排故以及通电调试。
(1)机器人 IPC 控制器
| 序号 | 名称 | 描述 |
| 1 | POWER | DC24V 电源接口 |
| 2 | ID SEL | 设备号选择开关 |
| 3 | PORTO1~POPT0 | NCUC 总线接口 |
| 4 | EtherCAT LAN2 | 外部标准以太网接口 2 |
| 5 | USB0 | 外部 USB1.1 接口 |
| 6 | RS232 | 内部使用的串口 |
| 7 | VGA | 内部使用的视频信号口 |
| 8 | USB1&USB2 | 内部使用的 USB2.0 接口 |
| 9 | LAN1 | 外部标准以太网接口 1 |
(2)机器人伺服驱动器
ZN-ZN603型 工业机器人伺服驱动器融合了 EtherCAT 通讯、共直流母线、能效管理、功能安全等多项创新技术,使产品在多轴同步控制、动态响应、能源效率等方面均达到国际领先水平。
伺服驱动器特性:
多种规格型号、宽范围:100W~1.5kW
多种反馈接口:17 位/20 位/23 位串行编码器、旋转变压器多种电压输入:单/三相 AC200V
多种通讯协议: EtherCAT、NCUC
分布式时钟,多轴同步指令偏差小于 1us 速度频率响应达 1.6kHz
电流前馈、加速度前馈控制
在线实时监测负载惯量,自动增益调整共直流母线结构,结构紧凑,扩展灵活支持多种类型伺服电机
控制模式实时切换,可满足不同终端应用的控制精度多达百种系统保护功能,全方位保护设备
(3)机器人夹具及典型应用实训组件
ZNH-IRW03型 工业机器人装调应用与维护实训平台配置工业机器人常见的典型功能应用案例,包含机器人轨迹描绘、机器人棒料搬运、机器人工件码垛三种实训组件;末端夹具采用多功能夹具模式, 包含轨迹描绘夹具、气缸夹持夹具、吸盘码垛夹具。学生在完成机器人本体、电气装调后,通过示教编程完成相应功能应用,掌握示教编程、夹具装调的使用方法。
(4)机器人与 PLC 控制
机器人在外部模式下,通过 PLC 程序设计,能正确控制机器人调用相应功能子程序,并能正确控制机器人启动、暂停和停止等,重点考核机器人在外部模式下 PLC 控制机器人作业流程方法。
五、配置清单
1、基本配置
| 序号 | 产品名称 | 数量 | 单位 | 备注 | 配置说明 |
| 1 | 六轴机器人 | 套 | 1 | 6 自由度 | 标配 |
| 2 | 机器人机械装配与调试实训平台 | 台 | 1 | 标配 | |
| 3 | 机器人电气系统及电气部件 | 套 | 1 | 标配 | |
| 4 | 机器人电气安装与调试实训平台 | 台 | 1 | 标配 | |
| 5 | 机器人本体工装 | 套 | 1 | 标配 | |
| 6 | 机器人多功能夹具 | 套 | 1 | 描绘笔、气缸夹持、吸盘 | 标配 |
| 7 | 实训对象组件 | 套 | 1 | 轨迹描绘、搬运、码垛模块 | 标配 |
| 8 | 机械及电气拆装工具 | 套 | 1 | 标配 | |
| 9 | 气泵 | 个 | 1 | 选配 | |
| 10 | 电脑 | 套 | 1 | 标配 |
2、耗材及配套工具
| 序号 | 名称 | 主要组成器件 | 数量 |
| 1 | 耗材 | 保险珠芯、0.50mm2 导线、1.5mm2 导线、号码管、接线端子等 | 1 套 |
| 2 | 配套工具 | 包括内六角扳手,10"活动扳手,扭力扳手,橡胶锤,铜棒,黄油枪;T 系列双头螺丝批、剥线钳、一字螺丝刀、精密绝缘端子压接钳、精密欧式端子压接钳、穿腮式迷你斜嘴钳、万用表。 | 1 套 |
六、实训任务及评分要求
| 实训内容 |
具体评分项 | 评分要求 |
|
| 评分内容 | 配 分 |
||
| 工业机器人机械装配与调试 | 1. 根据装配工艺流程图完成工业机器人关节轴结构件、谐波减速机及线束的装配; 2. 机器人关节轴装配工艺质量检测; 3. 机器人装配质量调整及优化。 |
30 |
1. 根据任务书的装配要求对机械系统部件及线束进行正确的装配,要求工艺步骤合理,传动组件调整顺畅,线束连接正确等; 2. 能正确使用听诊器、装配质量检测系统等检测手段对机器人装配质量进行检测; 3.根据装配质量检测结果对异常情况进行修复; 4. 零件表面无锈迹、油污、损伤的现象, 零件堆放整齐规范,场地整洁; 5. 机器人线束表面无损伤。 |
| 工业机器人电气系统安装与调试 | 1.根据电气原理图进行控制 器、伺服驱动器、IO 通讯模块以及电气元器件线路连接; 2.伺服驱动器及控制系统参数设置与调整; 3. 通电前检查; 4. 对机器人电气部分进行调试并对电气控制部分设定的故障进行判断并排除。 |
15 |
1. 电气线路连接正确,导线、号码管使用正确合理,控制器、驱动器、IO 模块等连接正确、走线合理; 2. 上电前安全检查,上电后初步检测元件工作是否正常,检查局部电路功能; 3. 故障点判断正确并记录,故障点排除正确。 |
| 工业机器人机电联调 | 1. 工业机器人单轴运转和多轴联动运转测试; 2. 工业机器人机械零点标定; |
15 |
1. 机器人单轴和多轴能够正常运转; 2. 机器人零点标定正确,并能正常进行回零操作; |
| 工业机器人多功能夹具装调 | 1. 多功能夹具安装及调整; 2. 对工业机器人及夹具进行联调,检查机器人与夹具的联动性,水平和垂直方向的直线运行功能; |
10 |
1. 正确安装多功能夹具的气缸和吸盘,正确安装电磁阀和真空发生器以及气路和线路,夹具能正常工作; 2. 装配后外形美观整洁,夹具测试夹紧松开、吸取放开等功能运行顺畅。 |
| 工业机器人功能应用验证 | 1. 机器人工具和工件坐标系标定; 2. 工业机器人轨迹描绘程序示教与编程; 3.工业机器人搬运程序示教与编程; 4.工业机器人码垛程序示教与编程。 |
20 |
1. 机器人坐标系标定正确; 2. 机器人能正常进行轨迹描绘、工件搬运、工件码垛工作流程; 3.机器人应用功能轨迹合理,无撞机发生,执行效率高。 |
| 工业机器人与PLC 控制联调 | 1. PLC 编程软件操作,程序导入和在线监控; 2. 通过触摸屏调用机器人功能子程序,并控制机器人运行。 |
5 |
1. PLC 程序编程软件正确操作,并能顺利从电脑下载到 PLC 中; 2. PLC 程序能正确调用机器人执行相应的功能程序,并能正常控制机器人启动/暂停/停止等。 |
| 职业素养与安全意识 | 1.现场操作安全保护符合安全操作规程; 2.工具摆放、包装物品、导线线头等的处理符合职业岗位的要求; 3.团队合作既有分工又有合作,配合紧密;遵守赛场纪律,尊重赛场工作人员,爱惜赛场的设备和器材,保持工位整洁。 |
5 | 1.现场操作安全保护符合安全操作规程,穿戴符合职业岗位要求; 2.工具比赛过程中各赛后未摆放整齐、节约使用耗材; 3.爱惜赛场的设备和器材,保持工位的整洁,团队分工有合作,遵守竞赛纪律,尊重裁判员、工作人员等。 |
