


 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114ZNT-MK01型 工业机器人模块化教学工作站
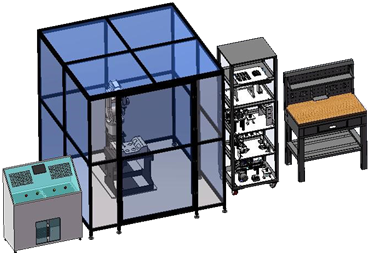
一、产品概述ZNT-MK01型 工业机器人模块化教学工作站设备由ABB工业机器人系统、PLC控制系统、电控箱、装配台、安全防护系统以及基础学习和实训套件、搬运实训套件、机床上下料实训套件、焊接实训套件、码垛实训套件、模拟涂胶实训套件、装配实训套件、伺服变位机实训套件、自动生产线实训套件等组成。能完成机器人技术的基础性培训教学,学习机器人的基本理论知识和基本操作技能,如机器人基本参数设置、轨迹规划、示教编程、基本调试、基本维护等技能。
设备采用模块化设计,各实训套件电气相互独立,可简易拆装更换任意套件,使实训更加灵活,同时增强学生动手能力。

ZNT-MK01型 工业机器人模块化教学工作站采用落地式的安装形式,保证设备的稳定可靠,同时采用多道防护装置,包含了有机玻璃防护网、安全门(安全锁)系统、安全光幕等硬件保护。
设备各套件采用工业标准件设计,可快速牢靠安装于工作台。设备可进行机械组装、电气线路设计与接线、PLC编程与调试、工业机器人编程与调试等多种实训,能够完成搬运、码垛、涂胶、装配、自动生产线等典型工作任务训练。除了满足工业机器人单机的培训之外,还考虑到机器人与外围设备之间的配合,将工业机器人和外围设备看作一个系统整体,以培养能够对整个系统进行装配、调试、以及熟练编程等能力为目标,同时满足职业资格鉴定要求。
三、技术性能
1.交流电源:单相 AC 220 V±10% 50Hz;
2.温度:-10~50℃;环境湿度:≤90%无水珠凝结;
3.外形尺寸(含防护栏):长×宽×高=(1800×1800×2000)mm(±5%)
4.整机功耗:≤6kW
四、设备结构与组成
(一)工业机器人
1、机器人本体
机器人本体由六自由度关节组成如下图,固定在型材实训桌上,活动范围半径不小于580mm。

机器人本体
机器人本体具体参数如下:
(1)规格
表1-1 机器人规格
| 型号 | 工作范围 | 有效荷重 |
| IRB 120 | 580 mm | 3 kg |
表1-2 机器人特性
| 集成信号源 | 手腕设10路信号 |
| 集成气源 | 手腕设4路空气(5 bar) |
| 重复定位精度 | 0.01 mm |
| 机器人安装 | 任意角度(支持地面、墙壁、倒装等多种方式) |
| 防护等级 | IP30 |
表1-3 机器人运动
| 轴运动 | 工作范围 | *大速度 |
| 轴1旋转 | +165°~ -165° | 250°/s |
| 轴2下臂 | +110°~ -110° | 250°/s |
| 轴3上臂 | +70°~ -90° | 250°/s |
| 轴4手腕旋转 | +160°~ -160° | 320°/s |
| 轴5手腕摆动 | +120°~ -120° | 320°/s |
| 轴6手腕回转 | +400°~ -400° | 420°/s |
表1-4 机器人性能
| 1 kg拾料节拍 | |
| 25×300×25 mm | 0.58 s |
| TCP*大速度 | 6.2 m/s |
| TCP*大加速度 | 28 m/s2 |
| 加速时间0-1 m/s | 0.07 s |
表1-5 机器人电气连接
| 电源电压 | 200~600V,50/60Hz |
| 变压器额定功率 | 3.0 kVA |
| 功耗 | 0.25 kW |
表1-6 机器人物理特性
| 机器人底座尺寸 | 180×180 mm |
| 机器人高度 | 700 mm |
| 重量 | 25 kg |
表1-7 机器人环境
| 机械手环境温度: | |
| 运行中 | +5℃至 +45℃ |
| 运输与储存时 | -25℃至 +55℃ |
| 短期*高 | +70℃ |
| 相对湿度*高 | 95% |
| 选件洁净室 | ISO 5级 |
| 噪音水平 | *高70 dB (A) |
| 安全性 |
安全停、紧急停 2通道安全回路监测 3位启动装置 |
| 辐射 | EMC/EMI屏蔽 |

机器人控制器
| 控制器型号 | IRC5紧凑型 |
| 电源 | 单相220V 50-60Hz |
| IO卡 | 16位I/O板(DSQC652 IO模块 16input/16output) |
| 特性 | 采用多处理器系统,PCI 总线,奔腾CPU,大容量闪存(256M),20s UPS 备份电源 |
3、示教单元
便携式示教盒,具备操纵杆和键盘,彩色触摸式显示,具中/英文菜单选项,示教器电缆10m。提供人机对话窗口,界面简洁大方;采用7吋彩色液晶显示器及高敏感度触摸屏,可通过按键或键盘对机器人进行操作;显示及监控信息丰富,机器人的当前状态信息、IO信息、伺服轴的速度、电流以及位置都可实时查询和监控;机器人各轴伺服参数可以通过示教盒在线设置。
(二)实训工位
实训工位单元采用铝合金框架、有机玻璃、安全门(锁)的结构组成,由有机玻璃和铝合金骨架组成透明防护罩。
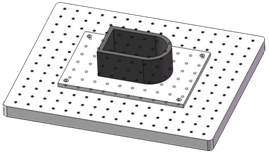
(三)操作对象承载台
操作对象承载台平台底座采用碳钢焊接而成,工作台面采用厚度20mm的不锈钢板,M6螺纹安装孔,可快速牢靠安装多种工作对象。

操作对象承载台效果图(仅供参考)
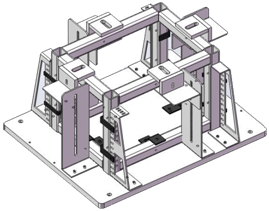
(四)工业机器人安装台
工业机器人安装台由地面安装地板、机器人安装底座、机器人安装底座底板、机器人安装面板、钢管焊接而成,直接安装在地面上,保证了设备的稳定运行。

机器人底座效果图(仅供参考)
(五)控制系统
控制系统主要由可编程控制器、人机界面、气动系统、电控箱等组成,配备西门子CPU226DC/DC/DC可编程控制器,昆仑通态 TPC1061Ti 触摸屏。用于控制机器人、电机、气缸等执行机构动作,处理各单元检测信号,管理工作流程、数据传输等任务。
电控箱带四个自锁脚轮,面板包括机器人输入、输出信号检测口,夹具信号输入输出检测口,模式选择按钮,可安装伺服驱动器、变频器、触摸屏、PLC等电气部件。通过电缆线与实训工位相连,两端使用航空插头,强弱电分离,连接安全可靠。同时含急停、启动、复位、暂停按钮、运行指示、停止指示,实训指示灯,实训急停开关一只,漏电开关,空气开关一只,开关电源,中间继电器,中继转换板一套,接线端子一套。线槽一套。

电控箱实物图(仅供参考)
(六)基础学习和实训套件
基础学习和实训套件包含轨迹示教模块和描图工具各1套,轨迹示教模块采用不锈钢加工制造,通过在平面、曲面上蚀刻不同图形规则的图案,可训练对机器人基本的点示教,直线、曲线运动足迹的掌握;学习点的定位及机器人运动路线选择优化。描图夹具采用焊接工装套件中的焊枪夹具,以焊丝为基准来进行,描图编程任务。

基础学习套件效果图(仅供参考)
(七)搬运工作站
搬运工作站包含搬运工作站和吸盘夹具各1套。搬运工作站由两块底板组成,底板上分别由四组不同形状和编号的工件组成,有圆形、正方形、六边形等。可通过不同点对点的搬运训练提高编程能力。吸盘夹具采用吸盘式夹具,包含真空吸盘、吸盘夹具、机器人法兰盘连接件等组成。

搬运实训套件(仅供参考)
(八)机床上下料实训套件
机床上下料实训套件采用铝合金及铝型材构建,由落料机构、检料平台、立体库、模拟机床气动卡盘等组成。落料机构包含有推料气缸、磁性开关、顶料气缸、物料不足检测传感器、检测平台传感器,模拟机床气动卡盘采用两台机床气动卡盘组成,成品库200×90×290mm ,共三层每层有三个工位,装配台135×120×140mm。机器人夹具等组成,机器人按照机床的不同工艺要求加工时间和周期的不同,进行有效的协调。

机床上下料实训套件效果图(仅供参考)
(九)焊接工装套件
工件尺寸330×260×200mm,工件原材料30×30×270mm四条,30×30×200mm八条,组合夹具一套组件在20件以上,焊枪等组成,对被焊接对象的多道焊缝进行模拟焊接。

焊接工装套件效果图(仅供参考)
(十)码垛工装套件
码垛工装套件包含码垛工作站和夹具各1套,码垛工作站采用铝材加工氧化的物料摆放底板和码垛底板组成,固定到操作台,根据要求物料块被摆放到摆放底板上,机器人通过吸盘夹具按要求拾取物料块进行码垛任务,物料块有长方形和正方形两种,操作者可根据需要选择摆放。可根据需要自由组合码垛出多种形状,练习对机器人码垛、阵列的理解并快速编程示教的应用技能。码垛夹具采用吸盘式夹具,包含真空吸盘、吸盘夹具、机器人法兰盘连接件等组成。

码垛工装套件效果图(仅供参考)
(十一)模拟涂胶实训套件
模拟涂胶工装套件包含涂胶工作站和涂胶夹具各1套,涂胶工作站由套件底板与被涂胶对象组成,对被涂胶对象的多道轨迹进行模拟涂胶。涂胶夹具由:1只涂胶枪,夹具本体及法兰盘连接件组成。
涂胶工作站效果图(仅供参考)
(十二)装配工装套件
装配工作站包含两套供料机构、料台检测、一个装配台,一个三层三列的立体库组成。具有外形工件料仓和内工件料仓,分别包括料台、料筒、顶料机构、推料机构顶料机构、料台平台传感器、物料不足传感器、成品库200×90×290mm,三层每层有三个工位,装配台135×120×140mm,气动夹具等。能按照主令信号的要求对储存在立体库中的零件取出,并进行装配,并放到指定的位置。
装配实训套件(仅供参考)
五、配套资源
本设备配套提供机械工业出版社出版的ABB机器人教材三种1套:《工业机器人实操与应用技巧》、《工业机器人典型应用案例精析》、《工业机器人工程应用虚拟仿真教程》。
六、实训项目
(1)工业机器人的基本认识工作任务。
(2)工业机器人示教器运动操作工作任务。
(3)工业机器人的点位示教工作任务。
(4)工业机器人基本参数设置工作任务。
(5)工业机器人基本运动指示工作任务。
(6)工业机器人基于示教器的程序编辑工作任务。
(7)工业机器人IO控制应用工作任务。
(8)工业机器人基本接线方法工作任务。
(9)PLC和多关节智能手腕的配合使用
(10)触摸屏和智能手腕的配合使用
(11)变频器和智能手腕的配合使用
(12)伺服和智能手腕的配合使用
(13)简单轨迹运行工作任务。
(14)平面圆形描图工作任务。
(15)平面矩形描图工作任务。
(16)曲面圆形描图工作任务。
(17)曲面矩形描图工作任务。
(18)固定位置搬运工作任务。
(19)平面矩阵码垛工作任务。
(20)斜面位置搬运装配工作任务 。
(21)平面矩阵立体码垛工作任务。
(22)涂胶编工作任务。
(23)模拟焊接工作任务。
(24)工件装配工作任务。
(25)机床上下料工作任务。
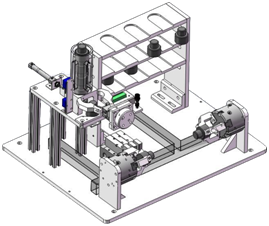
(26)伺服电机变位机的应用。
