 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114ZN-IGZ06型 机电一体化综合实训考核设备
一、概述
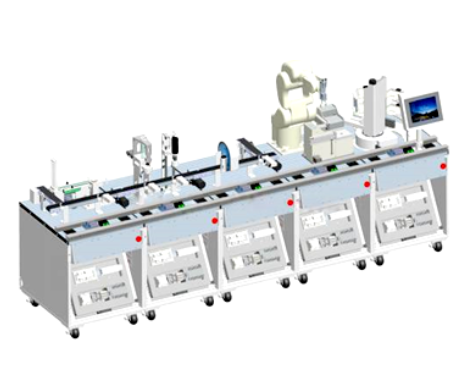
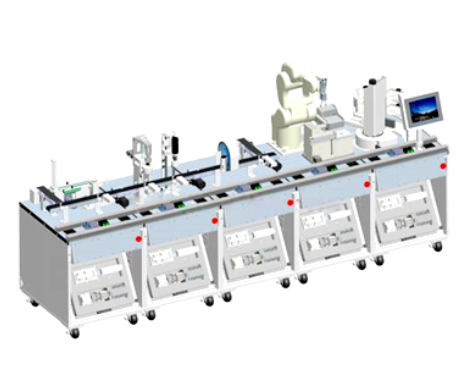
ZN-IGZ06型 机电一体化综合实训考核设备由颗粒上料工作站、加盖拧盖工作站、检测分拣工作站、工业机器人包装工作站、成品自动入库工作站组成,包括了智能装配生产系统、自动包装系统、自动化立体仓库及智能入库系统、自动检测机质量控制系统、生产过程数据采集及控制系统等,ZN-IGZ06型 机电一体化综合实训考核设备是一个完整的智能工厂模拟装置,应用了工业机器人技术、PLC控制技术、步进控制技术、伺服控制技术、工业传感器技术、电机驱动技术等工业自动化相关技术,可实现空瓶自动上料、颗粒物料多样上料、物料自动分拣、颗粒可选填装、自动加盖、自动拧盖、成品检测、成品分拣、机器人抓取入盒、盒盖包装、自动入库等智能生产全过程。
二、颗粒上料单元
技术参数:
1. 工作台尺寸:单站尺寸::600mm×720mm×780mm±20mm
2. 桌体采用§1.5mm厚的优质钢板
3. 桌面采用20×60mm铝型材拼接成型
4. 衔接缝隙≤3mm
5. 皮带宽度≥8mm
6. 颗粒上料单元由工作实训平台、物料筒、物料传输皮带、料瓶上料皮带、物料分拣皮带、灌装机构等部分组成
7. 颗粒上料单元能实现物料瓶的自动上料、物料颗粒的自动分拣及灌装处理
8. 工作实训平台采用钢铝结构。尺寸:600mm×720mm×780mm±20mm
9. 桌体采用§1.5mm厚的钢板做骨架
10. 桌面采用20×60mm铝型材拼接成型
11. 桌面可根据执行机构的联机情况随意调整安装位置
12. 物料传输皮带由支撑座、横杆、传动装置、过渡装置、驱动电机及护栏组成
13. 传输皮带采用两级过渡,相邻皮带间扩展拼接后衔接缝隙≤3mm
14. 支撑座采用铝材加工
15. 物料分拣皮带由支撑座、横杆、传动装置、过渡装置、逆向切换装置、驱动电机及护栏组成,可实现物料颗粒的自动循环上料
16. 灌装机构由旋转气缸、双轴升降气缸、真空吸盘及其联动机构组成
17. 将分拣完成的物料由分拣皮带搬运至物料瓶
18. 控制系统布置于万能网孔控制板或桌面平台上
19. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
20. 控制要求配套的低压控制器件
21. 低压控制器件采用相当于或优于施耐德等国际品牌产品
22. 控制面板采用优质PVC内置电路“模组式”设计
23. 控制按钮采用轻触式按键设计
24. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
三、加盖拧盖单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 桌面采用20×60mm专业铝型材
3. 加盖拧盖单元由工作实训平台、加盖执行机构、拧盖执行机构、物料传输皮带等部分组成
4. 加盖拧盖单元能实现将灌装好的料瓶进行加盖及拧紧处理
5. 工作实训平台采用钢铝结构
6. 桌体采用1.5mm厚的钢板做骨架
7. 机械加工成型,外表面喷涂彩色环氧聚塑
8. 桌面采用20×60mm铝型材拼接成型
9. 可随意调整安装位置
10. 加盖机构由物料筒、落料机构、送料机构、顶料机构等部分组成
11. 物料筒采用透明有机玻璃制作,能存放≥10个物料
12. 落料机构采用铝制材料加工成型
13. 送料机构、顶料机构气缸驱动控制
14. 拧盖机构由拧盖主轴电机、电机护罩、拧盖升降机构、顶盖机构等部分组成(在标书中提供设计图纸)
15. 拧盖升降机构、顶盖机构由气缸驱动控制(在标书中提供设计图纸)
16. 控制系统布置于万能网孔控制板或桌面平台上
17. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
18. 控制要求配套的低压控制器件
19. 低压控制器件采用相当于或优于施耐德等国际品牌产品
20. 控制面板采用优质PVC内置电路“模组式”设计
21. 控制按钮采用轻触式按键设计
22. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
四、检测分拣单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 检测分拣单元由工作实训平台、龙门检测机构、物料传输皮带、不合格品处置机构等部分组成
3. 对装配后的产品进行检测
4. 将不合格的物料进行分拣处理
5. 工作实训平台采用钢铝结构尺寸≥600mm×720mm×780mm
6. 桌体采用1.5mm厚的钢板做骨架
7. 桌面采用20×60mm铝型材拼接成型
8. 根据执行机构的联机情况随意调整安装位置
9. 龙门检测机构采用拱门式结构
10. 龙门检测机构装置有反射式传感器和光纤式传感器
11. 龙门检测机构装置有进行物料有无、瓶盖拧紧与否等工况的检测
12. 机构有反应检测合格与否信号的七彩灯带
13. 物料传输皮带与前工作单元的传输皮带采用统一设计
14. 不合格品处置机构由推送机构、不合格品传输皮带及物料检测传感器组成
15. 推送机构采用双轴气缸驱动
16. 不合格品传输皮带采用直流电机驱动
17. 控制系统布置于万能网孔控制板或桌面平台上
18. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
19. 控制要求配套的低压控制器件
20. 低压控制器件采用相当于或优于施耐德等国际品牌产品
21. 控制面板采用PVC内置电路“模组式”设计
22. 控制按钮采用轻触式按键设计
23. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
五、6轴机器人单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 桌体采用§1.5mm厚的钢板做骨架
3. 6轴工业机器人采用优于或相当ABB IRB120品牌
4. 6轴工业机器人载重量≥2Kg
5. 6轴机器人单元由工作实训平台、6轴工业机器人、物料提升机构及其控制系统组成
6. 工作实训平台采用钢铝结构,尺寸≥600mm×720mm×780mm
7. 桌体采用§1.5mm厚的钢板做骨架,外表面喷涂彩色环氧聚塑
8. 桌面采用20×60mm铝型材拼接成型
9. 可根据执行机构的联机情况随意调整安装位置
10. 工业机器人配置有气动手抓和真空吸盘两种夹具
11. 工业机器人可实现搬运、装配、贴标等功能
12. 物料提升机构采用步进电机控制,
13. 物料提升机构可同时储放三个物料,能实现自动提升
14. 控制系统根据布置于万能网孔控制板或桌面平台上,
15. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
16. 控制要求配套的低压控制器件
17. 低压控制器件采用相当于或优于施耐德等国际品牌产品
18. 控制面板采用PVC内置电路“模组式”设计
19. 控制按钮采用轻触式按键设计
20. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
六、成品入库单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 桌体采用1.5mm厚的钢板做骨架
3. 交流伺服系统控制成品入库单元由工作实训平台、环形仓库、环形码垛机、气压控制单元、触摸屏及其控制系统组成
4. 工作实训平台采用钢铝结构,尺寸≥600mm×720mm×780mm
5. 要求桌体采用1.5mm厚的钢板做骨架,外表面喷涂彩色环氧聚塑
6. 桌面采用20×60mm铝型材拼接成型
7. 可根据执行机构的联机情况随意调整安装位置
8. 环形仓库采用≥8mm厚的铝板加工成型
9. 按三层9仓位布置
10. 仓位上有与物料盒规格一致的凹槽
11. 偏于物料盒的存储和精准定位
12. 每仓位均安装有检测传感器
13. 可实时反应仓位的存储状态
14. 环形码垛机与环形仓库配套,运动部分交流伺服系统控制,物料的取送采用真空吸盘实现,运动机构采用的滚珠丝杆,可将物料盒精准的放置于每个仓位
15. 气压控制单元由气压三联件、用气量计数器等组成,能调节用气压力,能检测和记录系统的用气数量
16. 控制系统根据控制要求布置于万能网孔控制板或桌面平台上
17. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
18. 相当于或优于三菱MR-JE-10A的交流伺服系统(配套交流伺服电机)
19. 控制要求配套的低压控制器件
20. 低压控制器件采用相当于或优于施耐德等国际品牌产品
21. 控制面板采用PVC内置电路“模组式”设计
22. 控制按钮采用轻触式按键设计
23. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
七计算机编程工作台
长x宽x高:600mm×700mm×720mm±20mm。配置2台有相当于或优于联想系统配置相当于或优于ThinkM910T I7-7700(主频3.6)/16G/2T/DVDRW/GT730 2G独显/DOS/Q270主板/18L配19.5显示器,配置4个学生椅八、装配与维修工作台
1. 尺寸:1400mm×700mm×780mm±20mm (长×宽×高)
2. 要求由台身和台面、和工具柜三大部分组成
3. 要求带一体化存储式工具柜,3层抽屉式,带管理功能。
八、电源盒模块
1. 为8个单元提供交流电源
2. 有3路为3相5线电源
3. 5路为单相3线电源
4. 具有漏电保护、过流保护、等用电安全保护功能
九、技术参数
1.设备技术性能:
2.额定电压:AC380V ±10%
3.额定功率:3.3KW
4.安全保护功能:急停按钮,漏电保护,过欠压保护,过流保护,过热保护。
伺服:相当于或优于驱动器MR-JE-10A/电机HF-KN-13J-S100
通用变频器:相当于或优于FR-D740-0.4K
步进电机:XY系列
机器人:相当于或优于ABB IRB120
机器人控制器:相当于或优于ABB IRB120
十、实训考核项目
1、PLC基础任务实训
(1)PLC定时器元件应用
(2)PLC计数器元件应用
(3)PLC PLSR指令及相关特殊功能元件应用
(4)PLC PLSY指令及相关特殊功能元件应用
(5)PLC高速脉冲输入及相关特殊功能元件应用
(6)From/To模块读写特殊功能指令应用
(7)PLC PID特殊功能指令应用
(8)PLC RS协议通讯指令及相关特殊功能元件应用
(9)PLC N:N网络通讯令及相关特殊功能元件应用
(10)PLC 并行连接模式网络通讯及相关特殊功能元件应用
2、触摸屏
(1)触摸屏的工程创建、编辑与下载操作
(2)触摸屏的离线模拟应用
(3)触摸屏的在线模拟应用
(4)触摸屏的输入输出位元件应用
(5)触摸屏的输入输出字元件应用
(6)触摸屏的XY曲线图形元件应用
(7)触摸屏的动画元件应用
(8)触摸屏的数值、文本输入显示元件应用
(9)触摸屏的报警信息、事件登录等元件的应用
(10)触摸屏的定时器等元件的应用
(11)触摸屏的系统综合应用
3、上料灌装单元
(1)光电传感器的接线与调试
(2)直流电机的接线与调试
(3)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(4)基于皮带输送机构的机械安装与调试
(5)基于灌装机构的机械安装与调试
(6)基于上料灌装单元控制挂板的电气安装与调试
(7)基于上料灌装单元模型综合安装、接线与调试
(8)基于PLC的皮带上料机构运行控制
(9)基于PLC的灌装机构运行控制
(10)基于PLC的上料灌装单元综合运行控制
4、加盖拧盖单元
(1)光电传感器的接线与调试
(2)直流电机的接线与调试
(3)笔型气缸的安装和气量调节与磁性开关的接线和位置调整
(4)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(5)基于皮带输送机构的机械安装与调试
(6)基于加盖机构的机械安装与调试
(7)基于拧盖机构的机械安装与调试
(8)基于加盖拧盖单元控制挂板的电气安装与调试
(9)基于加盖拧盖单元模型综合安装、接线与调试
(10)基于PLC的加盖机构运行控制
(11)基于PLC的拧盖机构运行控制
(12)基于PLC的加盖拧盖单元综合运行控制
5、检测分拣单元
(1)光电传感器的接线与调试
(2)光纤传感器的接线与调试
(3)测水传感器的接线与调试
(4)直流电机的接线与调试
(5)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(6)基于皮带输送机构的机械安装与调试
(7)基于检测分拣单元控制挂板的电气安装与调试
(8)基于检测分拣单元模型综合安装、接线与调试
(9)基于PLC的检测分拣单元综合运行控制
6、6轴机器人搬运单元
(1)光电传感器的接线与调试
(2)行程开关的接线与调试
(3)步进电机的接线与调试
(4)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(5)基于步进升降机构的机械安装与调试
(6)基于机器人夹具的机械安装与调试
(7)6轴机器人的组成应用
(8)6轴机器人的初始化应用操作
(9)6轴机器人的编程/仿真软件应用操作
(10)6轴机器人的示教单元应用操作
(11)6轴机器人控制器应用操作
(12)6轴机器人的应用编程
(13)6轴机器人的I/O通讯应用设计
(14)6轴机器人的RS232通讯应用设计
(15)6轴机器人的安全操作应用设计
(16)6轴机器人的综合应用设计
(17)基于PLC的步进升降机构运行控制
(18)基于PLC的6轴机器人物料瓶子吸取放置应用控制
(19)基于PLC的6轴机器人搬运单元综合运行控制
7、立体仓库单元
(1)光电传感器的接线与调试
(2)行程开关的接线与调试
(3)气动吸盘安装与应用
(4)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(5)伺服驱动器的限位保护参数设置
(6)伺服驱动器的电子齿轮比参数设备
(7)伺服驱动器的位置模式运行控制
(8)伺服电机的力矩模式运行控制
(9)伺服电机的速度模式运行控制
(10)基于PLC PLSR指令的运行控制
(11)基于PLC PLSY指令的运行控制
(12)基于PLC的水平轴定位运行控制
(13)基于PLC的垂直轴定位运行控制
(14)基于PLC立体仓库综合运行控制
技术参数:
1. 工作台尺寸:单站尺寸::600mm×720mm×780mm±20mm
2. 桌体采用§1.5mm厚的优质钢板
3. 桌面采用20×60mm铝型材拼接成型
4. 衔接缝隙≤3mm
5. 皮带宽度≥8mm
6. 颗粒上料单元由工作实训平台、物料筒、物料传输皮带、料瓶上料皮带、物料分拣皮带、灌装机构等部分组成
7. 颗粒上料单元能实现物料瓶的自动上料、物料颗粒的自动分拣及灌装处理
8. 工作实训平台采用钢铝结构。尺寸:600mm×720mm×780mm±20mm
9. 桌体采用§1.5mm厚的钢板做骨架
10. 桌面采用20×60mm铝型材拼接成型
11. 桌面可根据执行机构的联机情况随意调整安装位置
12. 物料传输皮带由支撑座、横杆、传动装置、过渡装置、驱动电机及护栏组成
13. 传输皮带采用两级过渡,相邻皮带间扩展拼接后衔接缝隙≤3mm
14. 支撑座采用铝材加工
15. 物料分拣皮带由支撑座、横杆、传动装置、过渡装置、逆向切换装置、驱动电机及护栏组成,可实现物料颗粒的自动循环上料
16. 灌装机构由旋转气缸、双轴升降气缸、真空吸盘及其联动机构组成
17. 将分拣完成的物料由分拣皮带搬运至物料瓶
18. 控制系统布置于万能网孔控制板或桌面平台上
19. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
20. 控制要求配套的低压控制器件
21. 低压控制器件采用相当于或优于施耐德等国际品牌产品
22. 控制面板采用优质PVC内置电路“模组式”设计
23. 控制按钮采用轻触式按键设计
24. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
三、加盖拧盖单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 桌面采用20×60mm专业铝型材
3. 加盖拧盖单元由工作实训平台、加盖执行机构、拧盖执行机构、物料传输皮带等部分组成
4. 加盖拧盖单元能实现将灌装好的料瓶进行加盖及拧紧处理
5. 工作实训平台采用钢铝结构
6. 桌体采用1.5mm厚的钢板做骨架
7. 机械加工成型,外表面喷涂彩色环氧聚塑
8. 桌面采用20×60mm铝型材拼接成型
9. 可随意调整安装位置
10. 加盖机构由物料筒、落料机构、送料机构、顶料机构等部分组成
11. 物料筒采用透明有机玻璃制作,能存放≥10个物料
12. 落料机构采用铝制材料加工成型
13. 送料机构、顶料机构气缸驱动控制
14. 拧盖机构由拧盖主轴电机、电机护罩、拧盖升降机构、顶盖机构等部分组成(在标书中提供设计图纸)
15. 拧盖升降机构、顶盖机构由气缸驱动控制(在标书中提供设计图纸)
16. 控制系统布置于万能网孔控制板或桌面平台上
17. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
18. 控制要求配套的低压控制器件
19. 低压控制器件采用相当于或优于施耐德等国际品牌产品
20. 控制面板采用优质PVC内置电路“模组式”设计
21. 控制按钮采用轻触式按键设计
22. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
四、检测分拣单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 检测分拣单元由工作实训平台、龙门检测机构、物料传输皮带、不合格品处置机构等部分组成
3. 对装配后的产品进行检测
4. 将不合格的物料进行分拣处理
5. 工作实训平台采用钢铝结构尺寸≥600mm×720mm×780mm
6. 桌体采用1.5mm厚的钢板做骨架
7. 桌面采用20×60mm铝型材拼接成型
8. 根据执行机构的联机情况随意调整安装位置
9. 龙门检测机构采用拱门式结构
10. 龙门检测机构装置有反射式传感器和光纤式传感器
11. 龙门检测机构装置有进行物料有无、瓶盖拧紧与否等工况的检测
12. 机构有反应检测合格与否信号的七彩灯带
13. 物料传输皮带与前工作单元的传输皮带采用统一设计
14. 不合格品处置机构由推送机构、不合格品传输皮带及物料检测传感器组成
15. 推送机构采用双轴气缸驱动
16. 不合格品传输皮带采用直流电机驱动
17. 控制系统布置于万能网孔控制板或桌面平台上
18. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
19. 控制要求配套的低压控制器件
20. 低压控制器件采用相当于或优于施耐德等国际品牌产品
21. 控制面板采用PVC内置电路“模组式”设计
22. 控制按钮采用轻触式按键设计
23. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
五、6轴机器人单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 桌体采用§1.5mm厚的钢板做骨架
3. 6轴工业机器人采用优于或相当ABB IRB120品牌
4. 6轴工业机器人载重量≥2Kg
5. 6轴机器人单元由工作实训平台、6轴工业机器人、物料提升机构及其控制系统组成
6. 工作实训平台采用钢铝结构,尺寸≥600mm×720mm×780mm
7. 桌体采用§1.5mm厚的钢板做骨架,外表面喷涂彩色环氧聚塑
8. 桌面采用20×60mm铝型材拼接成型
9. 可根据执行机构的联机情况随意调整安装位置
10. 工业机器人配置有气动手抓和真空吸盘两种夹具
11. 工业机器人可实现搬运、装配、贴标等功能
12. 物料提升机构采用步进电机控制,
13. 物料提升机构可同时储放三个物料,能实现自动提升
14. 控制系统根据布置于万能网孔控制板或桌面平台上,
15. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
16. 控制要求配套的低压控制器件
17. 低压控制器件采用相当于或优于施耐德等国际品牌产品
18. 控制面板采用PVC内置电路“模组式”设计
19. 控制按钮采用轻触式按键设计
20. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
六、成品入库单元
技术参数:
1. 工作台尺寸:单站尺寸:≥600mm×720mm×780mm
2. 桌体采用1.5mm厚的钢板做骨架
3. 交流伺服系统控制成品入库单元由工作实训平台、环形仓库、环形码垛机、气压控制单元、触摸屏及其控制系统组成
4. 工作实训平台采用钢铝结构,尺寸≥600mm×720mm×780mm
5. 要求桌体采用1.5mm厚的钢板做骨架,外表面喷涂彩色环氧聚塑
6. 桌面采用20×60mm铝型材拼接成型
7. 可根据执行机构的联机情况随意调整安装位置
8. 环形仓库采用≥8mm厚的铝板加工成型
9. 按三层9仓位布置
10. 仓位上有与物料盒规格一致的凹槽
11. 偏于物料盒的存储和精准定位
12. 每仓位均安装有检测传感器
13. 可实时反应仓位的存储状态
14. 环形码垛机与环形仓库配套,运动部分交流伺服系统控制,物料的取送采用真空吸盘实现,运动机构采用的滚珠丝杆,可将物料盒精准的放置于每个仓位
15. 气压控制单元由气压三联件、用气量计数器等组成,能调节用气压力,能检测和记录系统的用气数量
16. 控制系统根据控制要求布置于万能网孔控制板或桌面平台上
17. 配置有相当于或优于西门子 SMART SR40 / ST40 /SR60系统
18. 相当于或优于三菱MR-JE-10A的交流伺服系统(配套交流伺服电机)
19. 控制要求配套的低压控制器件
20. 低压控制器件采用相当于或优于施耐德等国际品牌产品
21. 控制面板采用PVC内置电路“模组式”设计
22. 控制按钮采用轻触式按键设计
23. 设置有中英文“启动、停止、运行、单机、联机、急停”等控制功能
七计算机编程工作台
长x宽x高:600mm×700mm×720mm±20mm。配置2台有相当于或优于联想系统配置相当于或优于ThinkM910T I7-7700(主频3.6)/16G/2T/DVDRW/GT730 2G独显/DOS/Q270主板/18L配19.5显示器,配置4个学生椅八、装配与维修工作台
1. 尺寸:1400mm×700mm×780mm±20mm (长×宽×高)
2. 要求由台身和台面、和工具柜三大部分组成
3. 要求带一体化存储式工具柜,3层抽屉式,带管理功能。
八、电源盒模块
1. 为8个单元提供交流电源
2. 有3路为3相5线电源
3. 5路为单相3线电源
4. 具有漏电保护、过流保护、等用电安全保护功能
九、技术参数
1.设备技术性能:
2.额定电压:AC380V ±10%
3.额定功率:3.3KW
4.安全保护功能:急停按钮,漏电保护,过欠压保护,过流保护,过热保护。
伺服:相当于或优于驱动器MR-JE-10A/电机HF-KN-13J-S100
通用变频器:相当于或优于FR-D740-0.4K
步进电机:XY系列
机器人:相当于或优于ABB IRB120
机器人控制器:相当于或优于ABB IRB120
十、实训考核项目
1、PLC基础任务实训
(1)PLC定时器元件应用
(2)PLC计数器元件应用
(3)PLC PLSR指令及相关特殊功能元件应用
(4)PLC PLSY指令及相关特殊功能元件应用
(5)PLC高速脉冲输入及相关特殊功能元件应用
(6)From/To模块读写特殊功能指令应用
(7)PLC PID特殊功能指令应用
(8)PLC RS协议通讯指令及相关特殊功能元件应用
(9)PLC N:N网络通讯令及相关特殊功能元件应用
(10)PLC 并行连接模式网络通讯及相关特殊功能元件应用
2、触摸屏
(1)触摸屏的工程创建、编辑与下载操作
(2)触摸屏的离线模拟应用
(3)触摸屏的在线模拟应用
(4)触摸屏的输入输出位元件应用
(5)触摸屏的输入输出字元件应用
(6)触摸屏的XY曲线图形元件应用
(7)触摸屏的动画元件应用
(8)触摸屏的数值、文本输入显示元件应用
(9)触摸屏的报警信息、事件登录等元件的应用
(10)触摸屏的定时器等元件的应用
(11)触摸屏的系统综合应用
3、上料灌装单元
(1)光电传感器的接线与调试
(2)直流电机的接线与调试
(3)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(4)基于皮带输送机构的机械安装与调试
(5)基于灌装机构的机械安装与调试
(6)基于上料灌装单元控制挂板的电气安装与调试
(7)基于上料灌装单元模型综合安装、接线与调试
(8)基于PLC的皮带上料机构运行控制
(9)基于PLC的灌装机构运行控制
(10)基于PLC的上料灌装单元综合运行控制
4、加盖拧盖单元
(1)光电传感器的接线与调试
(2)直流电机的接线与调试
(3)笔型气缸的安装和气量调节与磁性开关的接线和位置调整
(4)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(5)基于皮带输送机构的机械安装与调试
(6)基于加盖机构的机械安装与调试
(7)基于拧盖机构的机械安装与调试
(8)基于加盖拧盖单元控制挂板的电气安装与调试
(9)基于加盖拧盖单元模型综合安装、接线与调试
(10)基于PLC的加盖机构运行控制
(11)基于PLC的拧盖机构运行控制
(12)基于PLC的加盖拧盖单元综合运行控制
5、检测分拣单元
(1)光电传感器的接线与调试
(2)光纤传感器的接线与调试
(3)测水传感器的接线与调试
(4)直流电机的接线与调试
(5)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(6)基于皮带输送机构的机械安装与调试
(7)基于检测分拣单元控制挂板的电气安装与调试
(8)基于检测分拣单元模型综合安装、接线与调试
(9)基于PLC的检测分拣单元综合运行控制
6、6轴机器人搬运单元
(1)光电传感器的接线与调试
(2)行程开关的接线与调试
(3)步进电机的接线与调试
(4)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(5)基于步进升降机构的机械安装与调试
(6)基于机器人夹具的机械安装与调试
(7)6轴机器人的组成应用
(8)6轴机器人的初始化应用操作
(9)6轴机器人的编程/仿真软件应用操作
(10)6轴机器人的示教单元应用操作
(11)6轴机器人控制器应用操作
(12)6轴机器人的应用编程
(13)6轴机器人的I/O通讯应用设计
(14)6轴机器人的RS232通讯应用设计
(15)6轴机器人的安全操作应用设计
(16)6轴机器人的综合应用设计
(17)基于PLC的步进升降机构运行控制
(18)基于PLC的6轴机器人物料瓶子吸取放置应用控制
(19)基于PLC的6轴机器人搬运单元综合运行控制
7、立体仓库单元
(1)光电传感器的接线与调试
(2)行程开关的接线与调试
(3)气动吸盘安装与应用
(4)双联气缸的安装和气量调节与磁性开关的接线和位置调整
(5)伺服驱动器的限位保护参数设置
(6)伺服驱动器的电子齿轮比参数设备
(7)伺服驱动器的位置模式运行控制
(8)伺服电机的力矩模式运行控制
(9)伺服电机的速度模式运行控制
(10)基于PLC PLSR指令的运行控制
(11)基于PLC PLSY指令的运行控制
(12)基于PLC的水平轴定位运行控制
(13)基于PLC的垂直轴定位运行控制
(14)基于PLC立体仓库综合运行控制
