 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114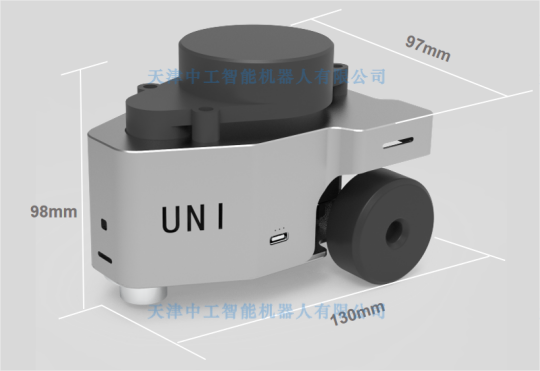
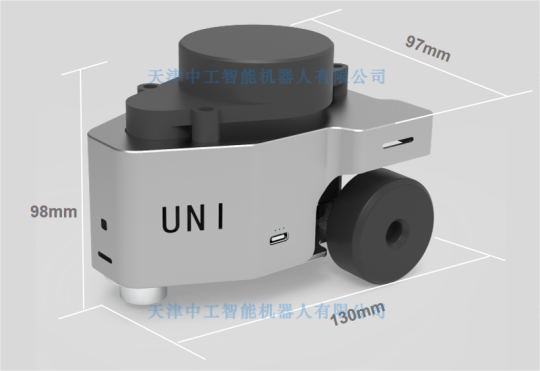
※1.机器人本体
构型:双驱三轮差速底盘
尺寸:长*宽*高不大于140mm*100mm*100mm;
重量:不大于600g;
速度:不小于0.15m/s;
精度:1m内定位精度不大于10mm;
直线度:1m直线度偏差不大于1.5cm;
2.机器人控制
控制器:Broadcom BCM2710A1, quad-core 64-bit SoC(Arm Cortex-A53 @ 1GHz);
操作系统:ROS操作系统;
※机器人话题清单:获取左轮编码器数值,获取左轮轮里程,获取左轮当前速度,设置左轮电机pid,获取右轮编码器数值,获取右轮当前速度,获取右轮电机当前pid,设置右轮电机pid,获取雷达原始数据,获取雷达切割完小车模型数据,获取小车里程信息。
3.机器人传感器
激光雷达:顶部雷达直径尺寸不大于62mm,检测距离不小于0.1-10m;采样频率10Hz;
导航方式:Catographer、Hector、Gampping;
4.机器人电源及驱动
电源:机器人内置电源,持续工作续航时间不小于3.5h,Type-C充电;
驱动:采用7位编码电机;
5.场地
模块化拼接场地,可搭建4种0.6m*0.6m桌面式场地,配置拼接板最大可扩展1.2m*1.2m场地。
6.配件:1.5米长Type-C数据线*1(含充电插头);
※7.实验项目
配置24课时实验项目,包含体验ROS的运行实验,构建ROS功能包实验,快速操作移动机器人导航实验,Catgrapher构建地图导航实验,Hector构建地图导航实验,Gampping构建地图导航实验,轮的PID控制与调试,移动机器人的运动学控制实验。
8.资源
教程资料:提供实验项目参数中所有实验的详细教程,纸质版本和电子版本各一份。
开源资料:提供所有例程源码;提供样机三维模型图和样机仿真三维模型。
课程支持:《机器人操作系统ROS》、《移动机器人导航与定位》、《自动控制原理PID》等。
