 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114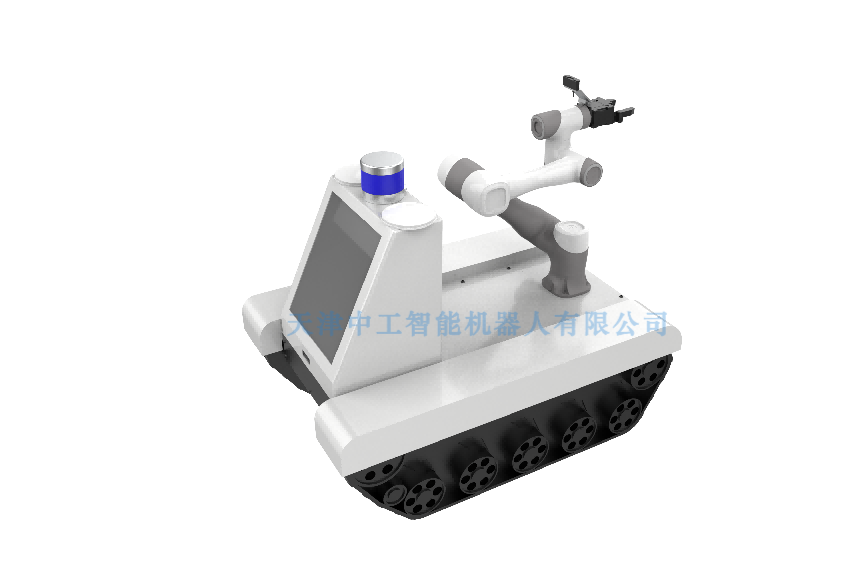
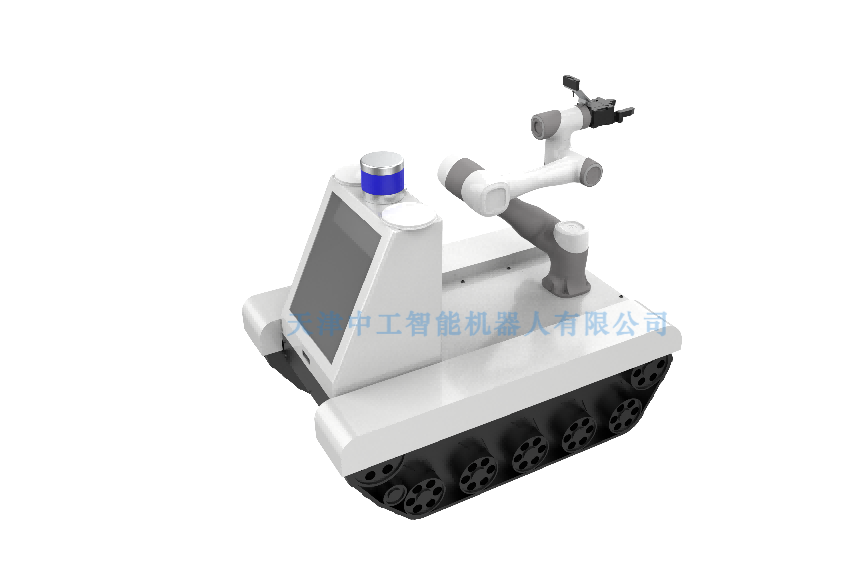
1、履带运动底盘:1.1. 悬挂系统: 克里斯蒂悬挂;1.2. 额定功率: ≥800W*2;1.3. 额定扭矩: ≥80NM;1.4. 运行速度: ≥1.5m/s;1.5. 最大越障: ≥150mm;1.6. 最大爬坡: ≥30度;1.7. 减震: 左右独立*10避震器;1.8. 续航能力: 2h;1.9. 载重: ≥60kg;1.10. 电池; 锂电池,48V;
2、控制器以及电源管理:控制器:CPU:i7;内存:8G;硬盘:120G固态硬盘;;电源管理:▲可编程控制每路电源通断,过流保护,短路保护,5V 5A电源≥10路,12V 20A电源≥10路,24V 20A 电源≥10路,48V 80A 电源 ≥5路;
3 、手臂执行系统:
硬件组成:手臂辅助定位相机*1;6自由度机械臂*1;柔性手抓*1;
3.1手臂辅助定位相机:彩色图像分辨率:1280x720,帧率:≥30fps;深度图像分辨率:640x480,帧率:≥7fps;测量范围:≥6米
3.2 6自由度机械臂:有效负载: ≥3kg;有效工作范围: 100mm~600mm;自由度:重复定位精度:≤±0.2mm;最大末端速度:≥1m/s;整机重量(含控制器):≤150kg;
3.3 柔性手抓:指数:3指;指长:≥58mm;最大半径:≥208.5mm;产品重量:≤691g;加持力:≥2500g;
3.4有源控制器:供电电压:24V;通讯方式:串口、IO;尺寸规格:≤220*206*80mm;输出气压:-70-100kPa;
4、定位导航系统:
硬件组成:差分GPS组合导航系统;三维激光雷达
性能参数:定位算法:2DSLAM+RTK;
导航算法:全局路径规划+局部路径规划;
应用环境:室内,校园,园区,变电站等结构化园区环境以及野外空旷环境; 定位精度:室内平均≤5cm;室外平均≤5cm;
▲路径规划方式:自主规划,指定路径;
▲避障方式:遇障停止,遇障绕行;
差分GPS组合导航系统:1. 标准单点定位精度: 单频:H≤3m,V≤5m(1σ,PDOP≤4),双频:H≤1.5m,V≤3m(1σ,PDOP≤4;2. 方位角精度:(0.2/R)°,R为基线距离,单位为米;3. 横滚或俯仰角:(0.4/R)°,R为基线距离,单位为米;4. 动态差分精度: H:±(10+0.000001×D)mm,V:±(20+0.000001×D)mm;
三维激光雷达:线数:≥16线;测距:≥100米(目标反射率20%);精度:+/-2cm;视角:≥垂直±15°,≥水平360°;角分辨率:水平/方位角0.09°(5Hz)至0.36°(20Hz)。
▲5 、功能:识别和摘取,提供苹果摘取的视频展示;
▲6 、实验课程,投标时提供包含以下内容的文档资料:
1 机器人传感器数据采集;2机器人移动控制;3手柄控制机器人运动;4机器人相对移动控制;5图像采集,查看与保存;6机器人地图构建;7机器人单点导航;8机器人多点导航;9激光雷达数据采集与可视化显示;10手臂关节控制项目;11手臂末端位置控制项目;12手抓控制;
