 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114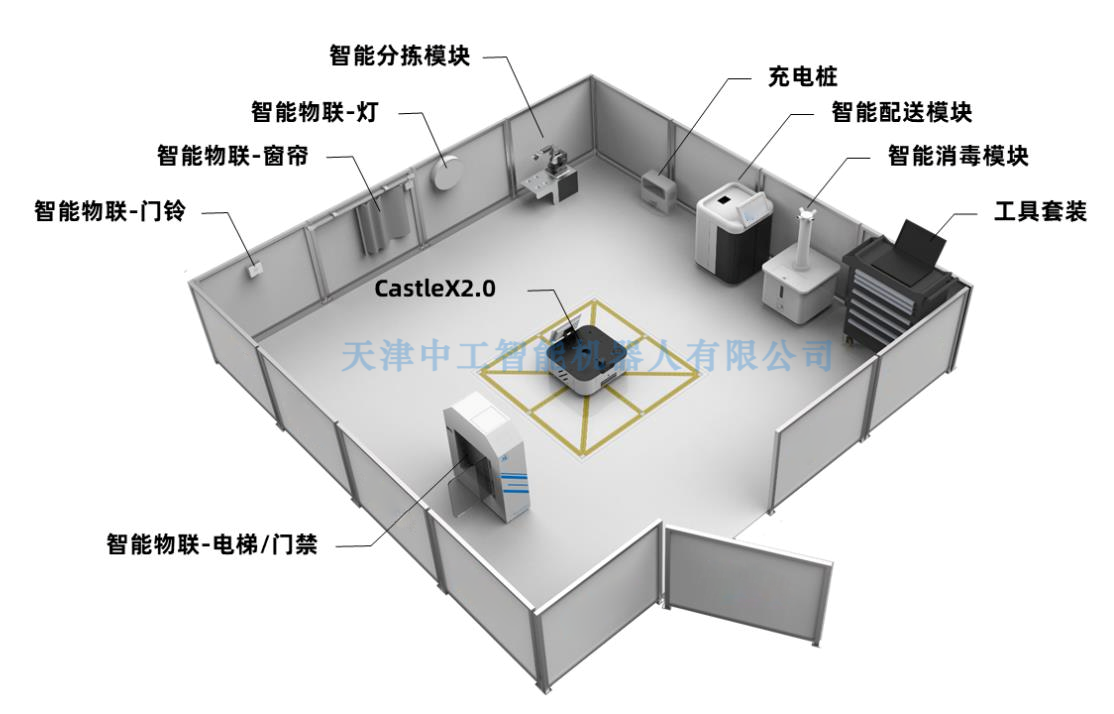
一、技术平台总体要求
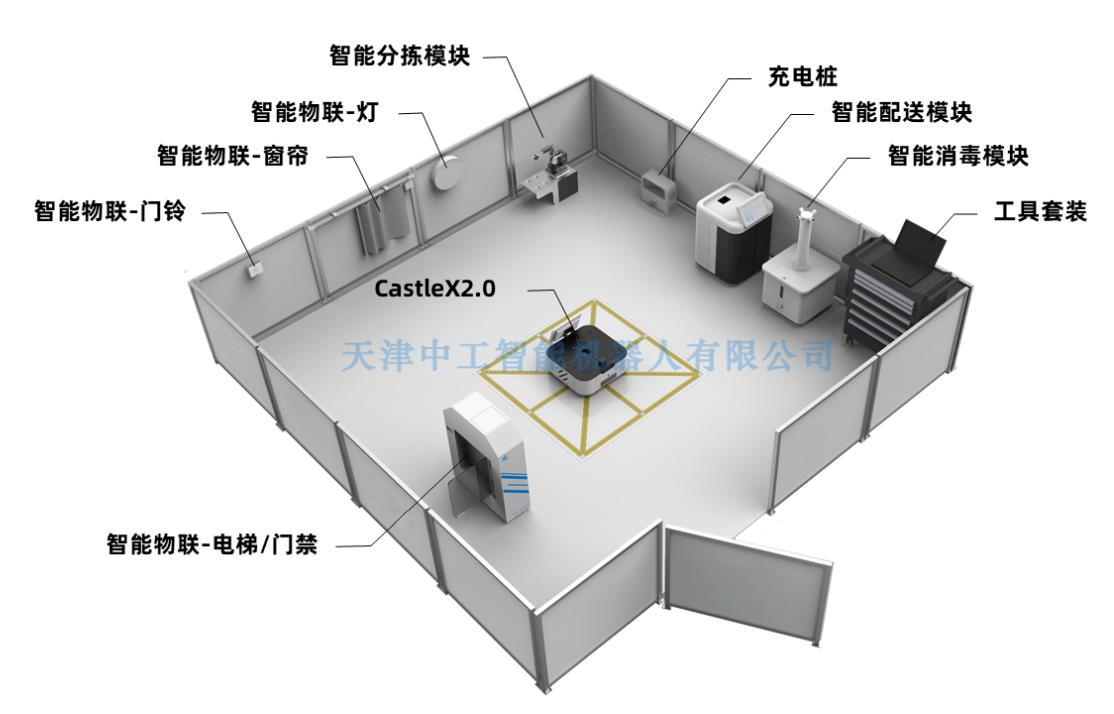
技术平台是基于通用的机器人操作系统(ROS)开发,可用于LINUX及ROS系统框架教学,C++,Python编程教学,也可用于算法验证和二次开发。配备激光雷达、深度摄像头、防跌落传感器、超声波传感器,具有同步定位与地图构建(SLAM),路径规划、语音交互和自动回充等功能,可拓展性强,顶层可选择搭载分拣模块、消毒模块、配送/送餐模块,配合机器人视觉系统可应用智能分拣、消毒、配送、送餐、导览、巡检等应用场景的服务机器人实训,完成人物料分拣、货物派送、人脸识别、定点导航、多点巡逻等任务。
二、技术平台主要设备技术参数
1.控制器参数
(1)CPU性能≥I5-10200u;
(2)MCU性能≥F407VET6;
(3)使用Ubuntu系统;
(4)内存≥8G DDR4;
(5)硬盘大小≥128G M.2 SSD;
(6)外部接口:USB 3.0接口数量≥4个,COM接口≥2个,音频接口≥1个,RJ45千兆网口≥2个,在响应文件中提供投标产品实物图片,图片中能体现各接口的数量;
(7)显示接口:HDMI 2.0,VGA;
(8)输入接口:≥1路急停开关接口,1路防撞触边传感器接口,1路防跌落传感器接口,6路超声波测距传感器接口,2路数字输入,1路TYPE-C串口接口;
(9)输出接口:2路PWM,2路DC-24V电源输出,5路DC-12V电源输出, 2路DC-5V电源输出,1路TYPE-C串口输出,1路CAN口输出。
2.移动管理系统参数
(1)移动类型:差速移动;
(2)车轮类型:橡胶轮、万向轮;
(3)车轮数量:≤6个;
(4)车轮负载能力≥30kg;
(5)电机数量:≥2个;
(6)电机码盘精度≥17-bit;
(7)电机内置温度传感器;
(8)轮胎外径≥169mm;
(9)电机电气和性能:额定输出功率160W,额定电压24VDC,额定转矩8N·m,瞬间最大转矩15 N·m,额定转速200rpm,最高转速500rpm,额定相电流14A,瞬间最大电流27A,编码器1400P/R,单边出轴方式。
(10)机器人需在狭窄的空间(600*600mm)内工作,机器人需满足狭窄空间工作要求,需提供相应的支撑材料。
3.电气系统参数
(1)超声波装置:
数量:≥2个
工作频率:≤40kHz
探测有效距离:1cm~500cm
探测分辨率:0.5cm
探测误差:±0.5%
接口类型:TTL(单线模式和双线模式可切换)
方向性侦测范围:定向式(水平/垂直)65度圆锥
(2)2D摄像头
数量:1个
感光元件类型:CMOS
默认速度:30帧/秒
信噪比:39dB
工作温度:-20~70℃
动态范围:56dB
输出分辨率:320*240/640*480/1280*720/1920*1080
输出格式:MJPG/YUY2(默认MJPG)
像素:200万
接口类型:USB2.0
(3)3D摄像头
数量:1个
深度范围(米):0.6m-6m
深度图分辨率:1280x1024@7FPS,1280x960@7FPS,640x480@30FPS,320x240@30FPS,160x120@30FPS
彩色图分辨率:1280x960@7FPS,640x480@30FPS,320x240@30FPS
精度:3mm@1m
深度FOV:H58.4° V45.5°
彩色FOV:H62.7° V49°
延迟(毫秒):30ms-45ms
数据传输:USB2.0或以上
供电方式:USB
(4)电池
数量:1个
电压:24V
容量:30AH
电池类型:锂电池
(5)光电传感器
数量:≥1个
检测方式:反射式,正面检测
连接方式:导线引出型
检测距离:10mm~4000mm
感应角度:30-40°圆锥角
可检测物体:Φ1mm以上透明/非透明物体
(6)激光雷达
尺寸:≤63mm*63mm*93.5mm
重量:≤550g
测量半径:8m
采样频率:15Hz
角度分辨率:0.33°
(7)IMU模块
通信方式:串口输出
横滚角、俯仰角静态误差:0.8°
横滚角、俯仰角动态误差:2.5°
(8)急停按钮
数量:≥1个
(9)触摸屏
屏幕类型:LCD
数量:1个
屏幕尺寸:≥10英寸
分辨率:1920x1080@60HZ
屏幕连接方式:HDMI
(10)扬声器
数量:≥1个
声道:2.0
(11)麦克风
硅麦数量:≥6个
频响范围:100HZ-16KHZ
灵敏度:-38dBV/Pa
信噪比:65dB
工作电流:300mA
接口类型:USB2.0
(12)物联网模块
数据服务:LTE(
LTE-FDD:最大 10Mbps(DL)/最大 5Mbps(UL)LTE-TDD: 最大7.5Mbps(DL)/最大1Mbps(UL)),GSM(EDGE: 最大 236.8Kbps(DL)/最大 236.8Kbps(UL)GPRS:最大 85.6Kbps(DL)/最大 85.6Kbps(UL))
频段:LTE-FDD: B1/B3/B5/B8,LTE-TDD: B34/B38/B39/B40/B41
数据连接:Max 10Mbps(DL)/ Max 5Mbps(UL)
接口:USB
功耗:2W(max)
(13)磁导航模块
供电电压范围:DC 9~36V
最大消耗电流:55 mA
检测灵敏度:0.5 mT
通信接口:RS-485\CAN
检测通道:16通道
检测极性:N极
检测有效距离:5~50 mm
使用温度范围:-20~+80 ℃
响应速度:1 ms
(14)自动回充模块
充电电压:24V
信号显示:回充模块内,红灯正在充电,绿灯已充满或未充电
(15)驱动器
控制方式:SVPWM 调制,闭环矢量控制
速度控制精度:±1rpm
电子齿轮:(1~9999)/(1~9999)
位置控制精度:±1pulse
制动方式:全新的再生能耗制动方式
过载能力:按实际最大电流计算过载倍数,过载持续15s
数字量输入:8 路光耦隔离输入
数字量输出:4 路光耦隔离输出,OC 输出接法
模拟量输入:2 路:-10V ~ +10V,运算放大器输入缓冲接口,电气不隔离
编码器输入:支持光电式、磁式等增量编码器
脉冲输入:单脉冲正负逻辑、双脉冲正负逻辑和正交脉冲正负逻辑六种输入方式
通讯总线:DS232、DS485、CAN
通讯协议:Modbus、Canopen
4.机器人控制系统软件
(1)底盘系统控制软件具有移动坐标控制及路径规划功能,能够自动导航到目标位置。
(2)具有SLAM功能,能够完成地图的重建,导航避障并且能够自动导航到目标位置。
(3)具有读取超声波传感器、激光雷达传感器、防跌落、2D相机和3D相机等传感器数据功能。
(4)物体识别功能:可通过与机械臂组合,通过机械臂摄像头对识别物体,并可通过机械臂抓取物体。
(5)底盘控制:可通过配套键盘手动控制机器人底盘运动
(6)具有语音唤醒功能,能通过语音唤醒机器人。
(7)具有语音识别功能,能识别语音输入,并显示识别结果。
(8)具有语音合成功能,能合成自定义文本的语音音频,并播放。
(9)具有语音控制机械臂抓取物体功能,通过与机械臂结合,及提供的程序范例,可实现通过语音输入,控制机械臂2D相机完成物体识别,控制机械臂完成物体抓取的功能。
(10)具有自主搬运物体功能。通过与相关功能模块的结合,可实现语音输入,离线命令词识别,机器人能自动完成路径规划、导航避障、物体识别、机械臂控制等。
5.机器人电气设计及验证系统
(1)系统支持对移动机器人电气系统进行设计、验证,支持检查机器人电气系统设计缺陷。
(2)系统包含完整的元器件库,支持自定义元器件,包含≥36,000个组件的数据库。
(3)直观的分析。
(4)系统具有直观设计验证功能,可在设计过程中更及时优化设计的性能,并在减少原型迭代次数的情况下确保电路满足技术要求。系统包含≥20种直观测量仪器以便将性能视觉化。支持在机器人编程软件中不断扩展自定义仿真分析库,用户可以视觉化特定领域的设计。
(5)快速设计功能。
(6)系统支持将移动机器人电气设计图转换为PCB,具有完整的电子表格查看功能保证有效的设计迭代管理。
2 智能消毒模块 一、智能消毒模块总体要求
智能消毒模块能精准高效地消灭病菌,迅速降低病菌密度,确保消毒过程的高效性。同时,它能识别并专注于需要消毒的区域,避免对其他不需消毒的区域造成损害或污染,实现精准的消毒操作。为确保安全性,智能消毒模块具备安全性能,能保证操作人员的安全,避免因操作不当或设备故障导致的意外伤害。
二、智能消毒模块主要设备技术参数
▲(1)超声波加湿≥3核,雾化出口≥3个;提供满足此功能的实物照片;
(2)支持使用的消毒液:过氧化氢、次氯酸等(消毒液需另购);
(3)具有拆卸式ROS-WH控制接口,能实现信号、电源等模块化传输;
(4)采用模块化设计,和通用服务机器人能组合成完整的消毒机器人;
(5)噪声不高于40dB,内置DC-12V风扇;
(6)结合通用服务机器人,可实现语音控制自动导航消毒;
▲(7)具有防干烧功能;提供满足此功能的实物照片;
(8)可通过自检程序对消毒机器人的硬件状态进行检测。
3 智能导览/巡检/配送三合一模块 一、智能导览/巡检/配送三合一模块总体要求
智能导览/巡检/配送三合一模块具备多场景适配能力,能根据需求实现导览、巡检、配送功能。三合一模块与通用服务机器人结合后,针对巡检功能,三合一模块能自动规划巡检路径,根据机器人当前位置和巡检点的位置,设计最合理的巡检路线,提高巡检效率,并能通过预设的程序或指令,自动执行巡检动作,记录巡检过程;针对导览功能,可概括为精准定位、实时更新、多元化信息、个性化推荐、易用性、数据分析、节能环保、安全可靠、适应性强以及可扩展性;针对配送功能,能根据订单需求和配送规则完成智能路径规划和优化,以提升配送效率。
二、智能配送模块主要设备技术参数
(1)≥800W像素高清摄像头,根据部署的训练模型能实现目标检测的功能,并传给服务端实现实时检测;
(2)高清广角摄像头,能识别障碍物,并根据训练的模型实现目标检测的功能,并传给服务端实现实时检测;
(3)头部预留通用服务机器人触摸屏安装位置,结合通用服务机器人底盘触摸屏,具有机器人人机交互界面,可提供人机交互功能,空闲时显示动态的拟态化脸部表情;
(4)具有拆卸式ROS-WH控制接口, 能实现信号、电源等模块化传输;
▲(5)采用模块化设计,和通用服务机器人能组合成完整的智能巡检服务机器人、智能导览服务机器人、智能配送服务机器人;提供满足此功能的实物照片;
(6)具有模块化可拆卸式围挡,能根据场景需求组装成开放式货舱的送餐服务机器人,或封闭式货舱的配送服务机器人,配送服务机器人可通过调用功能接口方式,实现人机交互控制仓门开关;提供包含此功能的系统界面截图;
(7)结合通用服务机器人,可实现巡检、导览、配送功能;
(8)可通过自检程序对机器人的硬件状态进行检测。
4 智能分拣模块 一、智能分拣模块总体要求
智能分拣模块具备高准确性的分拣能力,能够准确地将货物分拣到指定的位置,减少分拣错误和误差。同时,智能分拣模块能适应多种分拣场景需求,包括不同种类的货物、不同的分拣方式、不同的包装形态等,以实现灵活的分拣作业。
二、智能分拣模块主要设备技术参数
(1)供电电压12V;
(2)负载650g;
(3)4相步进电机;
(4)三路步进电机驱动板;
(5) 64位的四核处理器;
(6)串口通信;
(7)5V吸泵模块;
(8)USB广角摄像头;
(9)具有拆卸式ROS-WH控制接口,能实现信号、电源等模块化传输;
▲(10)采用模块化设计,和通用服务机器人能组合成分拣服务机器人;提供满足此功能的实物照片;
(11)可通过自检程序对分拣机器人的硬件状态进行检测。
5 智能物联网模块 一、智能物联网模块总体要求
智能物联网模块具备高准确性和快速响应的能力,能够准确地识别不同的命令并即刻执行,待机时间长。同时,智能物联网模块能够快捷地添加或删减物联网设备。根据不同的场景需求及展示需求,完成场景设备部署,以实现灵活的配置需求。
二、智能灯光系统
(1)MCU性能不低于STM32F103C8T6;
(2)支持通用串行总线、CAN,不少于7个定时器,不少于2个ADC,不少于1路ADC, 不少于1路PWM接口;
(3)电源:12V;
(4)发光温度不高于40摄氏度,重量不大于0.4kg;
▲(5)采用MQTT网络通信协议,支持服务器端订阅信息;提供满足此功能的截图证明;
(6)提供TCPROS/UDPROS控制接口,通过接口即可获取所有设备的数据信息;
三、智能门铃系统
(1)不低于32位ARM核心的带64K字节闪存的微控制器;
(2)支持通用串行总线、CAN,不少于7个定时器,不少于2个ADC,不少于9个通信接口;
(3)支持定制WIFI、LORA、NB-IOT等常用的物联网通信协议;
(4)内置集成放大电路驱动有源蜂鸣器、ESP8266 WI-FI模组,通信频段2.4GHz、支持WPA/WPA2模式。
(5)内置Tensilica L106超低功耗32位微型MCU,MCU支持TCP、UDP、HTTP、FTP网络通信协议。
(6)提供TCPROS/UDPROS控制接口,通过接口即可获取所有设备的数据信息;
(7)待机功率不高于1.0mw;
(8)平均工作电流位:80mA。
四、智能窗帘系统
(1)不低于32位ARM核心的带64K字节闪存的微控制器;
(2)支持通用串行总线、CAN,不少于7个定时器,不少于2个ADC,不少于9个通信接口;
(3)支持定制WIFI、LORA、NB-IOT等常用的物联网通信协议;
(4)驱动电压:4.8-7v,4.8V,转速大于44圈/分。
(5)集成ACS712电流检测芯片,1.2毫欧内部电阻,总输出误差为1.5%。
▲(6)提供MQTT网络通信协议和TCPROS/UDPROS控制接口,通过接口即可获取所有设备的数据信息;提供满足此功能的截图证明;
▲(7)支持PWM宽度脉冲调制输的模拟控制方式,可变速位置型舵机;提供满足此功能的截图证明;
五、智能闸门系统
(1)不低于32位ARM核心的带64K字节闪存的微控制器;
(2)支持通用串行总线、CAN,不少于7个定时器,不少于2个ADC,不少于9个通信接口;
(3)支持定制WIFI、LORA、NB-IOT等常用的物联网通信协议;
(4)驱动电压:4.8-7v,4.8V,转速大于44圈/分。
(5)集成ACS712电流检测芯片,1.2毫欧内部电阻,总输出误差为1.5%。
(6)提供MQTT网络通信协议和TCPROS/UDPROS控制接口,通过接口即可获取所有设备的数据信息;
(7)支持PWM宽度脉冲调制输的模拟控制方式,可变速驱动舵机。
6 智能编程设备 智能编程设备主要提供给实训完成编程任务,远程调试设备等。
(1)可视化终端:不低于21.5寸;
(2)中央处理器:Intel i5或同等以上处理器;
(3)内存不低于16G 三代双倍速率的SDRAM、时钟频率不低于1066MHz、数据传输带宽不低于8.5GB/s、电压不高于1.5V;
(4)硬盘:≥256GB可用空间;
(5)系统为Ubuntu 64位版本,能流畅使用相关工程软件。
(6)主要用于编程任务的实现,以及机器人软件的使用。
7 工具套装
(1)掌上万用表;
(2)内六角扳手套装;
(3)活动扳手;
(4)斜口钳;
(5)十字、一字螺丝批;
(6)备用螺丝;
(7)物联网模块备用电池;
(8)物联网模块电源适配器;
(9)排插。
