 手机:18526021390
手机:18526021390 传真:022-23307114
传真:022-23307114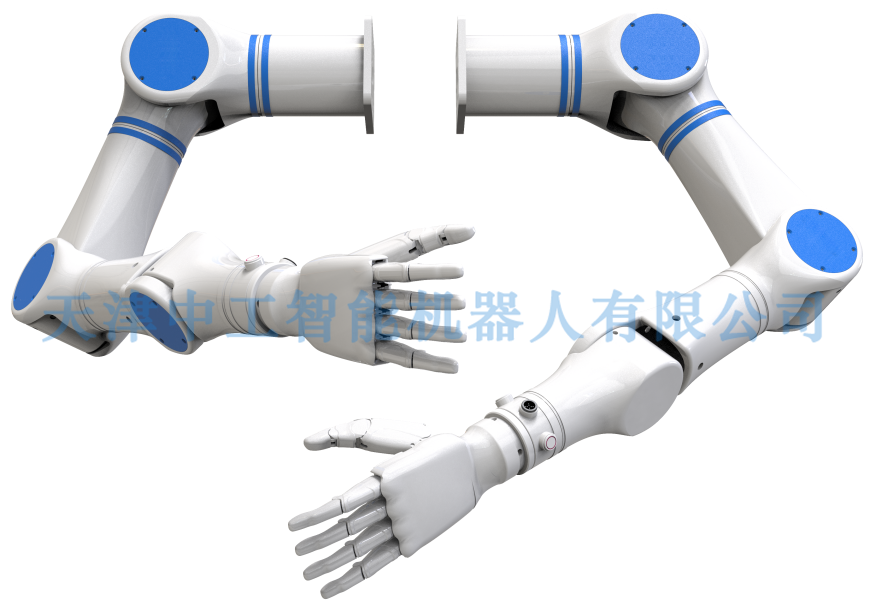
一、产品概述
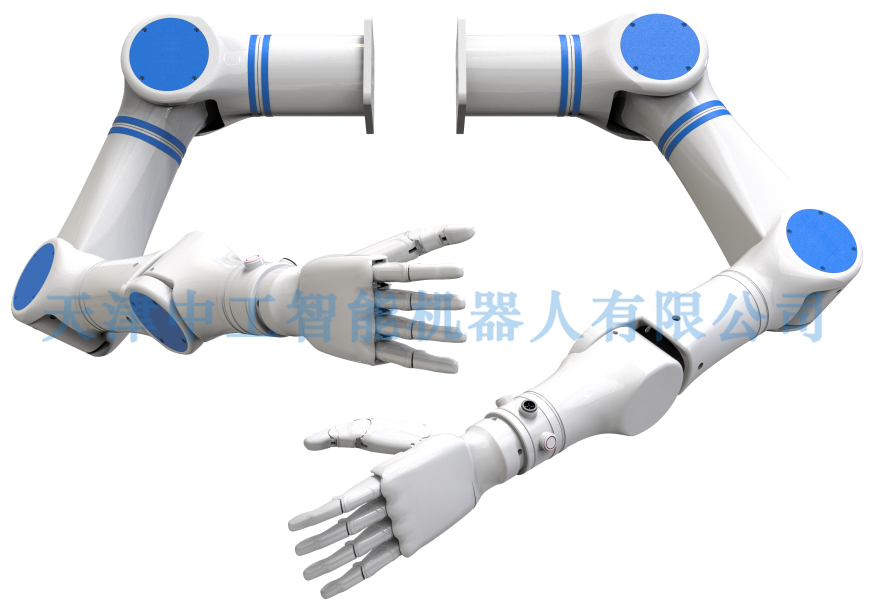
本产品是一款专为人形机器人开发的七轴协作机器人,完全符合人体的肩关节、肘关节、腕关节型态,高度还原人类手臂的自由度。手臂采用一控二的控制系统,即一个控制器控制两台手臂,可以有效的实现双臂协同与冲突规避。同时,手臂还配备电子皮肤,具备预碰撞感知功能,在运动过程中,可实时感知与周围人体的距离,当两者距离≤10cm时,手臂将自动停止,确保人员的安全。
另外,手臂还开放电机级精细控制及运动学、动力学控制算法,方便开发者进行优化,可无缝集成各类移动平台、视觉系统、语音交互模块及多种传感器,拓展性强,适用于教育、科研、服务、制造、物流、医疗等多个领域。
二、产品功能和特点
1、完全拟人形态
包含肩部、肘部、腕部三个关节,共七个自由度,完全拟人形态,可像人手一样灵活的实现人类手臂的各种功能,支持人形机器人快速适配和应用开发,大幅缩短开发周期。另外,七轴手臂相比六轴而言,在运动过程中没有奇异点,可以非常流畅的到达空间中的任意位置,从而尽可能还原人类手臂的运动模式。
2、一控二机器人控制器
产品搭载一控二机器人控制器,实现单控制器对双七轴手臂的并行控制(一控二模式),可同步驱动两台七轴手臂完成高精度协作任务,除较传统方案有效的节省部署空间与硬件成本外,还内在的支持双臂协同功能。控制器体积约164×147×48mm,可同时提供14路输入输出,运动指令响应周期≤1ms。
3、双臂协同与深度视觉
手臂支持双臂协同,且通过轨迹规划算法、碰撞检测与避障算法,可高度模拟人类手臂的灵活性和协调性。另外,搭配了深度视觉系统,可以实时进行环境-物体感知,为双臂提供精准的视觉反馈,以实现更加复杂和精准的操作任务。
4、电子皮肤
产品配置了电容感应式电子皮肤,采用高灵敏度柔性传感材料覆盖于手臂表面,可实时检测5cm-15cm范围内的物体接近状态,实现厘米级空间感知和避障。因此,在双臂协作场景中,双层防护机制(预接触预警+接触急停)可以有效提升人机协作安全性。
5、部署具身大模型
手臂与DeepSeek等开源AI大模型深度融合,通过AI大模型训练手臂的SDK,使其可以理解用户的复杂指令,推理出真实意图,并最终自主规划手臂的运动路径,做出决策和反馈。同时,还提供AI大模型自主训练的全流程技术,包括融合视觉、语音等传感器,让用户能够根据应用场景对模型进行数据收集、模型训练、验证和部署。
6、开源控制算法
在电机控制上,可开放部分关节模组、控制器与手臂关节之间的控制源码;在运动学算法上,开放部分底层运动学正逆解模型的源码。通过代码开源,用户可以从事人形机器人软硬件层面的各类科研、开发工作。
三、规格参数
1. 手臂自由度:7
2. 重复定位精度:±0.1mm
3. 手臂最大负载:5kg
4. 工作半径:513mm
5. 臂长:850mm
6. 自重:12kg
7. 手腕拓展:两指夹爪、五指灵巧手等
8. 供电方式:外部供电
9. 供电电压/电流:24V/25A DC
10. 额定功率:约120W(峰值约600W)
11. 材质:铝合金
12. 工作环境:-10℃~55℃
13. 安装方式:任意
14. 通信方式:WIFI/RJ45
15. 控制方式:PC端
16. 底座尺寸:100mm×100mm
17. 关节活动范围:J1:±179°,J2:±96°,J3:±179°,J4:±94°,J5:±179°,J6:±91°,J7:±179°。
